About
Hi! My name is Frank, I am currently a Computer Science MS student at Northwestern University at the Design Automation of Intelligent Systems Lab advised by Prof. Qi Zhu. I also work closely with Prof. Chao Huang at University of Southampton. I am also worked as a Robotics Learning Intern at the Stanford Vision and Learning Lab advised by Prof. Fei-Fei Li.
I received my Bachelor’s Degree with summa cum laude in Computer Science and Mathematics in 2024, also from Northwestern University. I had the privilege of collaborating with Professor Florian Willomitzer at the 3DIM Lab.
I have a broad interest in robotic learning and control. I’m fascinated by the challenge of building autonomous robots that navigate complex environments and perform long-horizon tasks efficiently and safely. I am researching on equipping robots with safe learning and runtime decision-making capabilities within uncertain environments subject to disturbances or observation delays. This interest extends from common applications like self-driving vehicles to humanoid robotics. Looking ahead, I aim to design state-of-the-art learning methods that effectively assist humans in complex tasks, while prioritizing safety alongside performance.
Within robotic learning and control, I am particularly interested in:
Data-Driven Control in Uncertainty: developing safe reinforcement learning and model predictive control strategies that can handle uncertainties and observation delays in dynamic environments.
Safety Verification: Equipping robots with decision-making capabilities that assess the safety of learned systems, especially in the presence of neural network controlled systems.
Skill-Based Learning: Developing long-horizon skill acquisition from expert demonstration. This includes creating benchmark metrics and high-fidelity real2sim and sim2real transfer.
Please see my CV for a full list of work, teaching, and other experiences.
News
- [May 2025] Submitted Master Thesis “Safety-Assured Autonomy of Learning-Enabled Emobodied AI Agents”!
- [May 2025] Submitted a paper on delayed offline RL to NeurIPS 2025
- [Demember 2024] - Submitted a paper on delayed IRL to L4DC 2025
- [October 2024] - Invited talk to RV 2024
- [August 2024] - Submitted POLAR-express to Embedded Systems Week 2024 tool presentation (Winner of ESSC 2024)
- [July 2024] - One paper accepted to RV 2024
- [June 2024] - Started as a Robotic Learning Intern at Stanford Vision and Learning Lab
- [May 2023] - One paper accepted to MMLS 2023
Publications
S. Zhan, Q. Wu, F. Yang, X. Shi, C. Huang, Q. Zhu. Learning in Slow Motion: Adapting Offline Reinforcement Leanring with Online Delays. Neural Information Processing Systems, 2025. Paper (In submission)
S. Zhan, Q. Wu, Z. Ruan, F. Yang, P. Wang, Y. Wang, R. Jiao, C. Huang, Q. Zhu. Inverse Delayed Reinforcement Learning. Learning for Dynamics and Control, 2025. Paper (In submission)
F. Yang, S. Zhan, Y. Wang, et al. Case Study: Runtime Safety Verification of Neural Network Controlled System. Runtime Verification, 2024. Paper
F. Yang*, Y. Wen*. Efficient Encoding of Graphics Primitives with Simplex-based Structures. Midwest Machine Learning Symposium, 2023. Paper
Research Projects
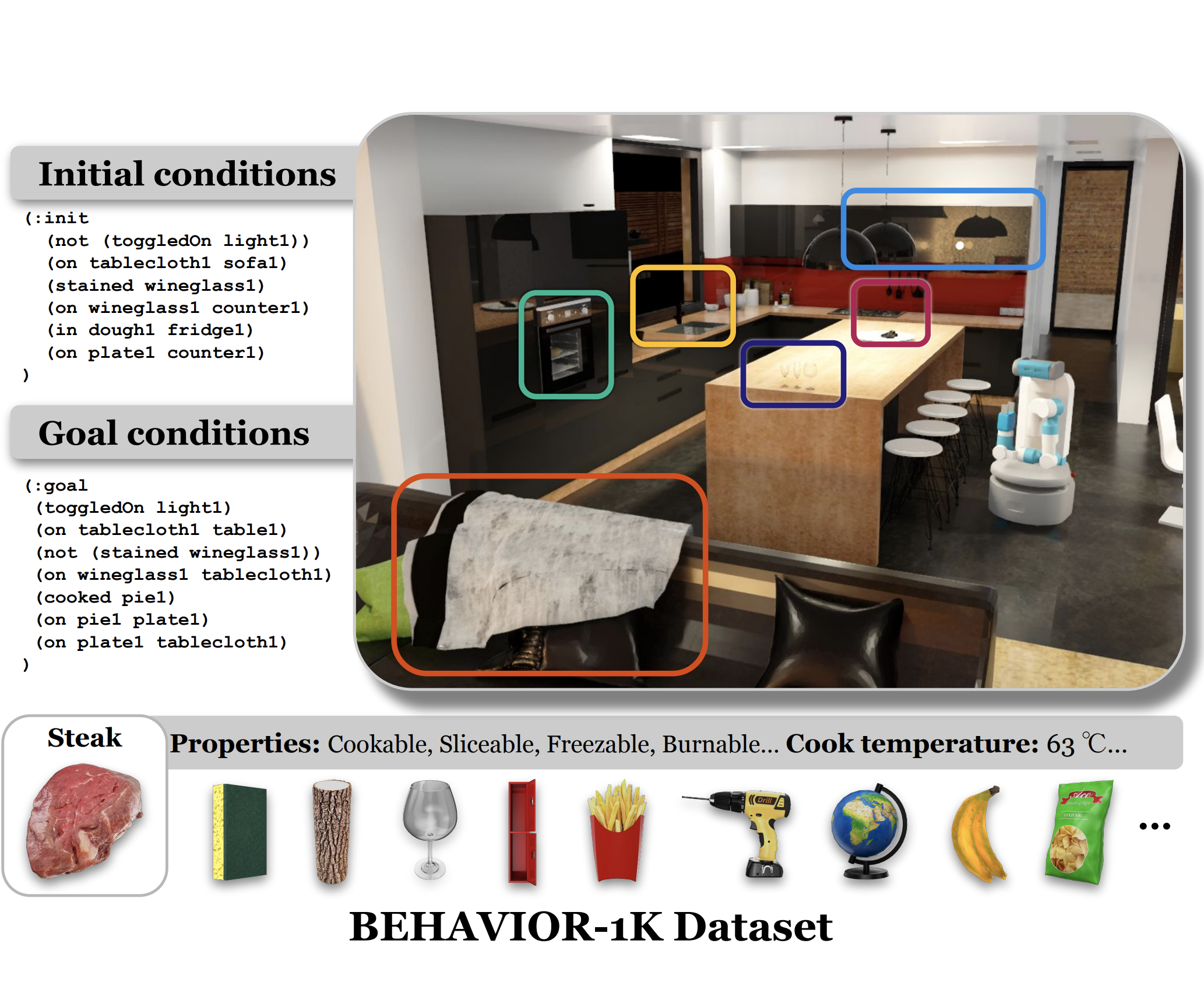
Behavior 1K: A Human-Centered, Embodied AI Benchmark with 1,000 Everyday Activities and Realistic Simulation
Advised by: Fei-Fei Li
Sources: Project / Paper
Development on BEHAVIOR-1K: 1000 embodied-AI robotic learning simulation benchmark built upon NVIDIA Omniverse engine; Decomposed complex, long-horizon tasks into learnable action primitives (pick, place, navigate); Implemented a collision-free action primitives execution pipeline using curobo
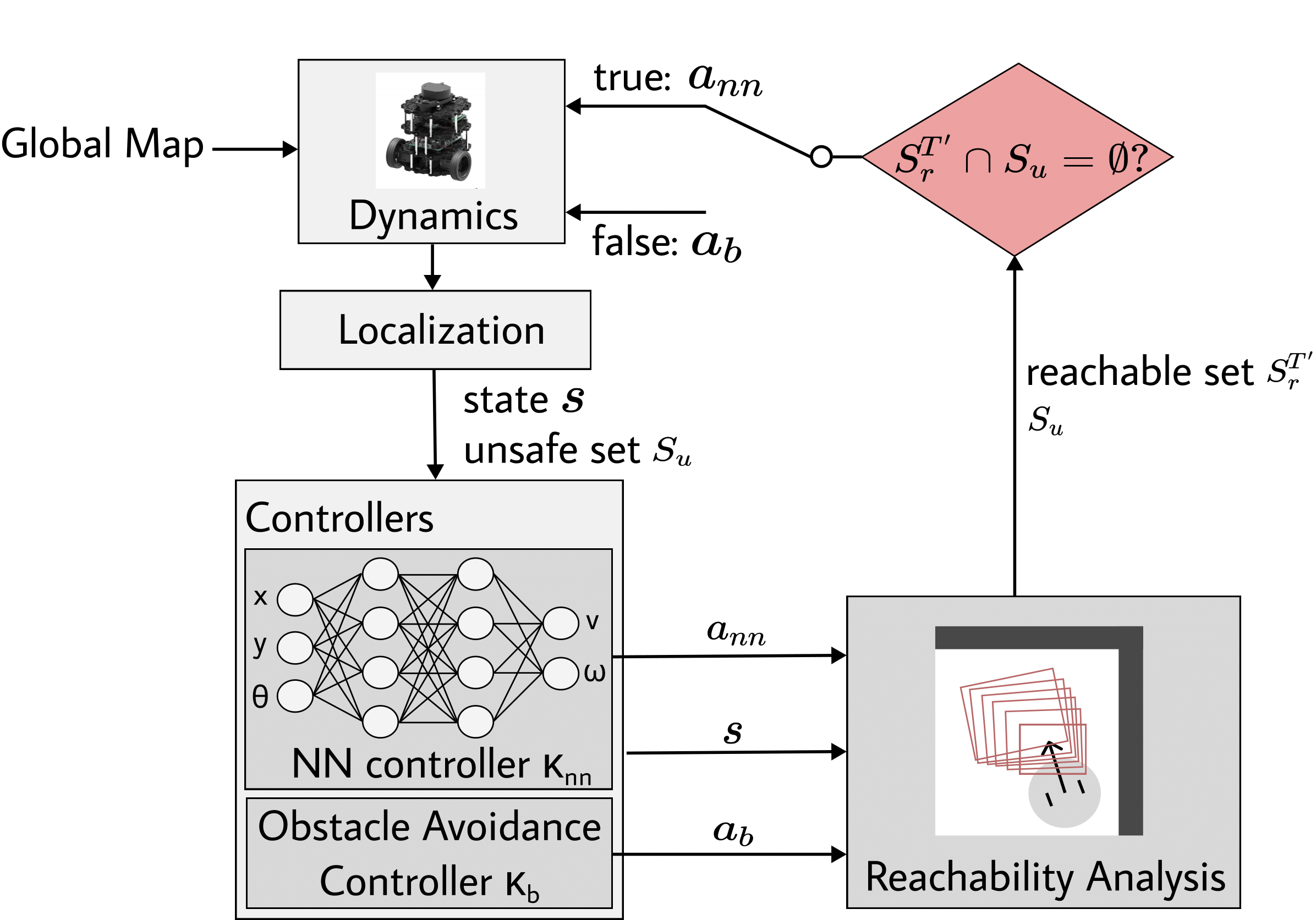
POLAR-Express: Efficient and Precise Formal Reachability Analysis of Neural-Network Controlled Systems
Advised by: Qi Zhu
Sources: Paper / Tool
Performed runtime safety verification case study with POLAR-express on Turtlebot3 in ROS2 simulation; Proposed online controller switch strategy for safety-critical control systems with neural networks; Designed an IRL framework that employs off-policy adversarial training to extract reward features from expert trajectories affected by observation delays
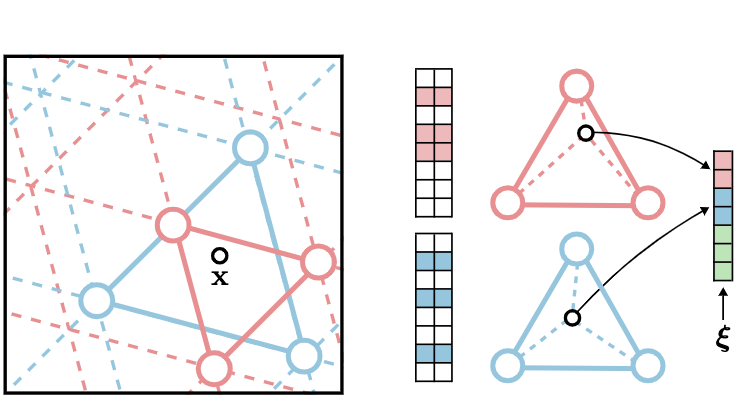
Efficient Encoding of Graphics Primitives with Simplex-based Structures
Advised by: Ying Wu
Source: Paper
Surveyed the encoding of graphics primitives proposed by “Instant NGP”; established theoretical foundations for simplex-based structure encodings and accelerated sample and interpolation speed on NeRF and SDF rendering with C++/CUDA kernels
Teaching
Graduate TA for CS340: Computer Networking taught by Alexandar Kuzmanovic, Winter 2023
Graduate TA for CS310: Scalable Software Architectures taught by Joe Hummel, Fall 2023
Undergraduate TA for CS396: Intro to Web Development taught by Sarah Van Wart, Spring 2022
Project Manager for Institute of Electrical and Electronics Engineers, 2022
Other Projects
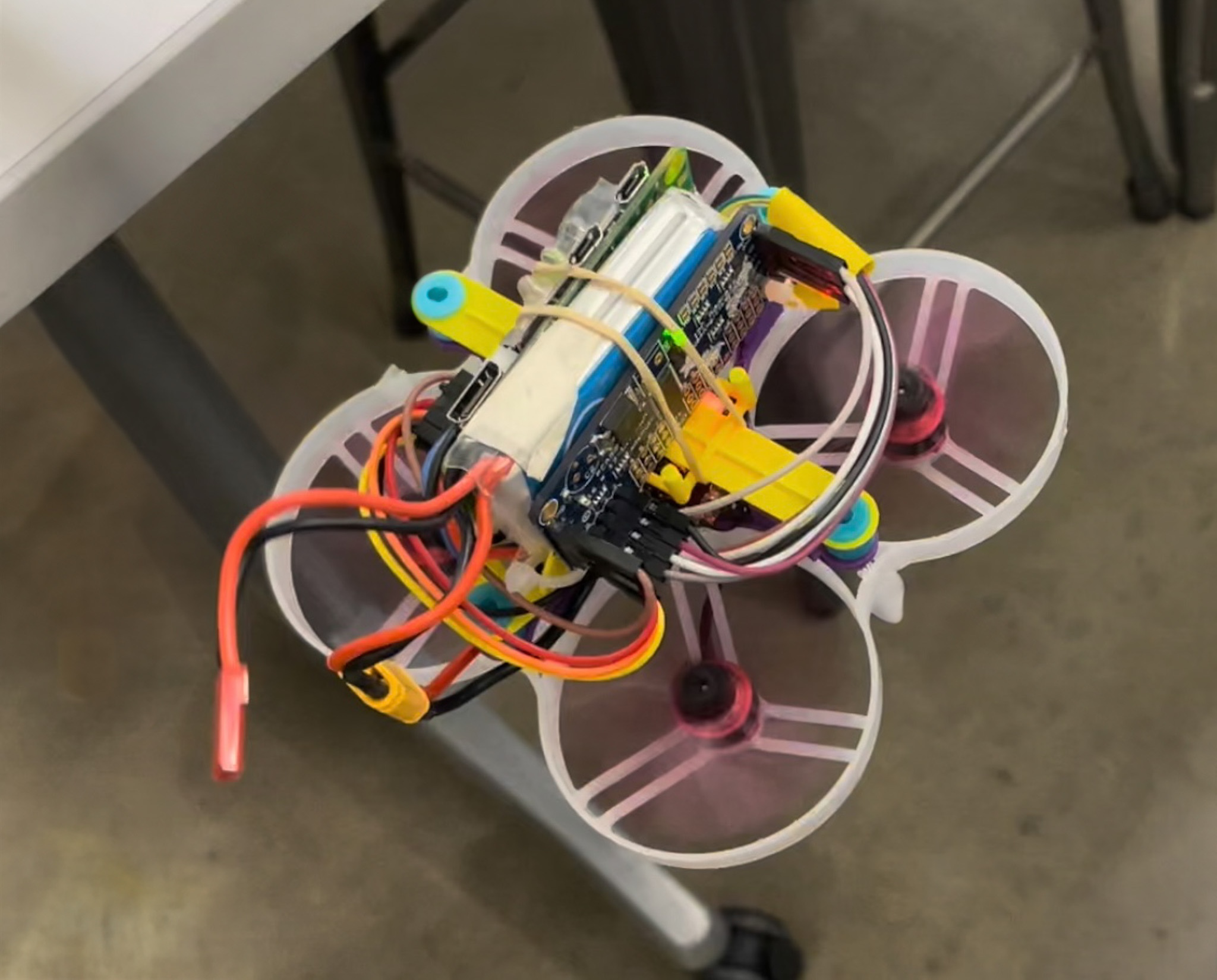
Quadrotor Design and Control
(Mar 2024 - Jun 2024)
Source: Code
Developed a WiFi-enabled quadrotor using Raspberry Pi and IMU; implemented PID control, safety measures, and joystick interfacing in C that allows stable manual flight control; integrated Vive Lighthouse with IR sensors to enable autonomous flight control with precise 3D positioning
Reminiscia
(Dec 2022 - May 2023)
Source: Code
Implemented a multimodal text-to-image search application using pretrained vision-language models; employed Vision and CoreML to allow calculations of cosine similarity between text and image embeddings; distilled original 224MB CLIP model into an 85MB, 6-layer image encoder to improve inference speed
Transformer-based Lie Detection
(Feb 2022 - Jan 2023)
Advised by: Zach Wood Woughty
Source: Code
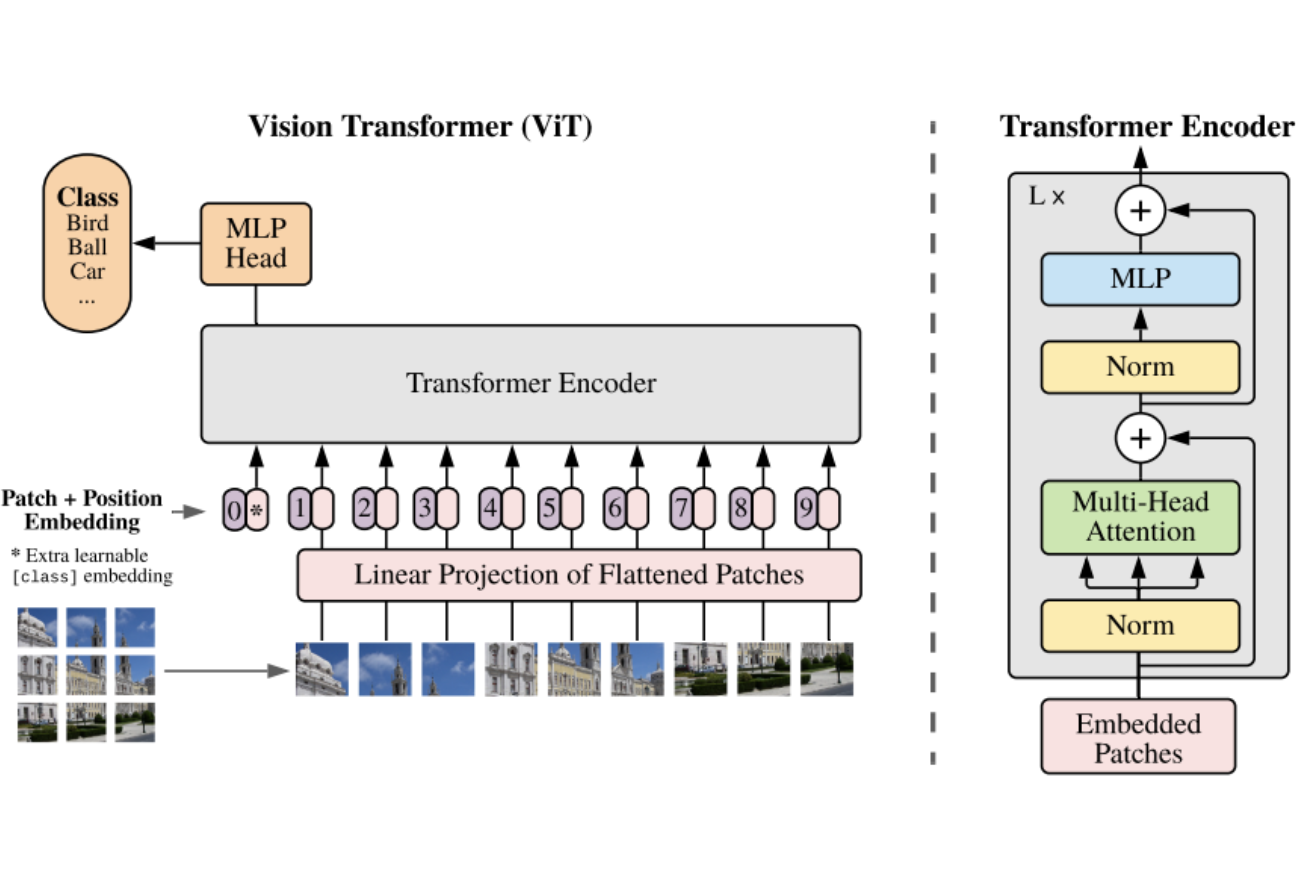
Conceptualized a vision-based transformer that detects lies from multimodal inputs with PyTorch; trained a transformer encoder from fine-tuning Inceptionv3; pinpointed 20 micro-gestures and facial AUs that most contribute to lying; resulted an out-of-sample lying classification of 76%
Work Experiences
Software Engineer Intern @ Target (June 2023 - Aug 2023)
Developed a Golang application within a Vela CI/CD pipeline to enforce security and compliance standards
Integrated Postgres with RestAPI for build lifecycle and versioning information retrieval and storage
Lead Tech Engineer @ Skuy (Apr 2022 - Jun 2024)
Built a college community network app startup, amassed 1000+ users on both the App Store and Google Play
Led a 2-months database migration from Heroku to Firebase for service growth and stability
Configured CI/CD pipeline on Expo for IOS Pod and Android Gradle builds
Software Development Engineering Intern @ Amazon (Jun 2022 - Sep 2022)
Implemented a Sagemaker site that provides benchmarked health & architecture evaluations for ML models
Presented a demo to Sagemaker engineers; received candidacy to beta-launch model cards on AWS Re:Invent
Skills
Languages: Python, Go, TypeScript, SwiftUI, HTML/CSS/JavaScript, C++
Robotic Learning: ROS2, Torch, CUDA, TensorFlow, OpenCV
Web/Mobile Development: React, React Native, Flask, Redux, Node, ESLint, Cypress
DevOps: RestAPI, AWS, Firebase, Heroku, Elastic Beanstalk, Git, Vela, Docker, MySQL, PostgresSQL
Cimematography

Outside of school, I am a freelance photographer taking landscape, portrait, and graduation photos. In my creative endeavor, I am a cinematographer working on film projects such as Applause For A Cause and TEDx. I am committed to creating cinematic lighting and true-story shots that evokes emotion. Check out my portfolio for my fun side!
![]()
